

惯性导航系统(Inertial Navigation System,简称INS)是一种不依赖于外部信息、完全依靠惯性传感器(如加速度计和陀螺仪)来测量运载体自身状态(位置、速度、姿态)的自主导航系统。IMU(Inertial Measurement Unit)即惯性测量单元,是惯性导航系统的核心组成部分,它包含加速度计和陀螺仪,用于测量运载体在三个轴向上的加速度和角速度。
IMU的工作原理基于牛顿第二定律和角动量守恒定律。加速度计测量运载体在各个方向上的加速度,而陀螺仪则测量运载体相对于惯性空间的角速度。通过积分这些测量值,可以计算出运载体的速度和姿态。再进一步积分,可以得到运载体的位置。
惯性导航系统具有高精度、高可靠性、完全自主等优点,广泛应用于航空航天、航海、军事等领域。然而,由于惯性传感器的误差会随着时间积累,因此需要定期进行校准或与其他导航系统(如GPS)进行组合使用,以提高导航精度和可靠性。-黑料吃瓜网
惯性导航系统(IMU)在自动驾驶领域的应用与前景
一、惯性导航系统(IMU)概述

惯性导航系统(IMU)是一种利用惯性传感器测量物体运动状态的导航系统。它主要由加速度计、陀螺仪和微处理器组成。加速度计用于测量物体的线性加速度,陀螺仪用于测量物体的角速度,微处理器则负责处理传感器数据,计算物体的位置、速度和姿态。-吃瓜微信群
二、惯性导航系统(IMU)工作原理
惯性导航系统(IMU)的工作原理基于牛顿第一定律,即物体在没有外力作用下,将保持静止或匀速直线运动。IMU通过测量物体的加速度和角速度,可以计算出物体的运动轨迹。具体来说,IMU的工作原理如下:
加速度计测量物体的线性加速度。
陀螺仪测量物体的角速度。
微处理器根据加速度计和陀螺仪的数据,计算出物体的速度和位置。
通过积分速度和位置数据,得到物体的运动轨迹。
三、惯性导航系统(IMU)在自动驾驶领域的应用
惯性导航系统(IMU)在自动驾驶领域具有广泛的应用,主要包括以下几个方面:
车辆定位:IMU可以提供高精度的车辆位置信息,为自动驾驶车辆提供准确的导航服务。
车辆姿态估计:IMU可以测量车辆的倾斜角度和旋转角度,为自动驾驶车辆提供稳定的姿态信息。
车辆运动控制:IMU可以实时监测车辆的运动状态,为自动驾驶车辆提供精确的运动控制。
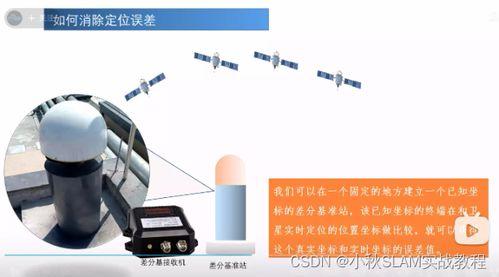
辅助定位:IMU可以与其他定位系统(如GPS、GLONASS等)结合,提高定位精度和可靠性。
四、惯性导航系统(IMU)的未来发展趋势

高精度:未来IMU将朝着更高精度的方向发展,以满足自动驾驶对定位精度的要求。
小型化:随着微电子技术的不断发展,IMU将朝着小型化、轻量化的方向发展,便于在自动驾驶车辆中应用。
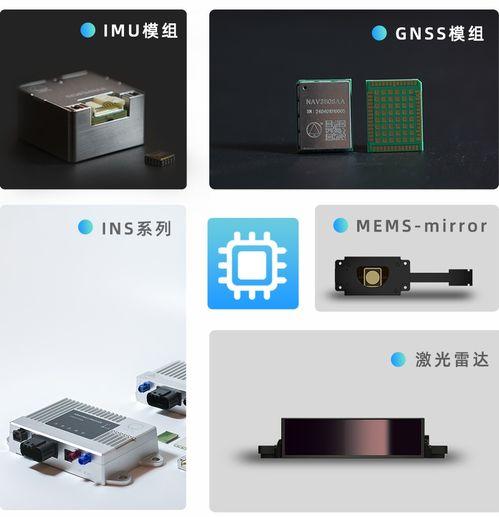
集成化:未来IMU将与其他传感器(如摄像头、雷达等)集成,形成更加完善的自动驾驶系统。
惯性导航系统(IMU)在自动驾驶领域具有广泛的应用前景。随着技术的不断进步,IMU将在精度、小型化、集成化和智能化等方面取得更大的突破,为自动驾驶技术的发展提供有力支持。



